بزرگترین وبلاگ تخصصی ، تفریحی ایرانیان
بزرگترین وبلاگ تخصصی ، آموزشی و تفریحی ایرانیانبزرگترین وبلاگ تخصصی ، تفریحی ایرانیان
بزرگترین وبلاگ تخصصی ، آموزشی و تفریحی ایرانیاننکاتی در مورد موتورهای الکتریکی
اساس چرخش موتورهای DC
اگر سیم حامل جریان در درون یک میدان مغناطیسی قرار گیرد، به آن نیروئی وارد می شود. این، اساس کار موتورهای DC است.
اصول چرخش موتورهای سنکرون
(همزمان)شکل مقابل، اساس کار موتورهای سنکرون را نشان می دهد؛ به این صورت که با به چرخش درآمدن آهنربای نعلی شکل، آهنربای کوچک نیز به حرکت در می آید. چون قطب N آهنربای کوچک کنار قطب S آهنربای نعلی شکل قرار دارد، همدیگر را جذب می کنند و قفل مغناطیسی بوجود می آورند که بصورت همزمان شروع به چرخش می کنند. در عمل استاتور موتورهای سنکرون سه فاز را سیم پیچی می کنند. زمانی که استاتور را به شبکه وصل می کنیم، میدان گردان بوجود می آید که با سرعت سنکرون می چرخد. روتور این موتورها نیز سیم پیچی شده است که توسط منبع DC تغذیه می شود. روتور نیز میدان مغناطیسی ثابتی ایجاد می کند. برای راه اندازی موتور سنکرون، ابتدا روتور را به سرعت سنکرون می رسانیم و بعد جریان استاتور را وصل می کنیم. در این صورت، قفل مغناطیسی به وجود می آید و موتور پس از قطع محرک اولیه، با سرعت سنکرون می چرخد.
نکته 1: ماشین سنکرون، ماشینی است که هم بعنوان ژنراتور سنکرون و هم بعنوان موتور سنکرون می تواند به کار رود.
نکته 2: از این موتور برای اصلاح ضریب قدرت در کارخانه ها استفاده می شود.
اصول چرخش موتورهای آسنکرون
(غیرهمزمان)شکل روبرو، اصول چرخش موتورهای آسنکرون را نشان می دهد؛ به این صورت که با به حرکت درآمدن آهنربای نعلی شکل در میله های قفس جریانی بوجود می آید. در نتیجه این جریان، میله ها نیز شروع به حرکت می کنند (میله حامل جریان در میدان). حرکت آهنربا و قفس همیشه بصورت غیرهمزمان خواهد بود. این موتورها بخاطر ساختمان ساده ای که دارند، در صنعت بیشترین استفاده را دارند. به این موتورها، موتورهای القائی یا روتور قفس سنجابی می گویند. در عمل، وقتی استاتور این موتورها را به شبکه وصل می کنیم، میدان دوار سنکرون بوجود می آید. میله های روتور داخل این میدان شروع به چرخش می کنند؛ یعنی همیشه سرعت روتور کمتر از سرعت سنکرون استاتور خواهد بود.
میدان دوار
شرط بوجود آمدن میدان دوار یا حوزه مغناطیس دوار، وجود اختلاف فاز زمانی و مکانی 120 درجه سیم پیچها در داخل استاتور است
الکتریسیته
تاریخچه الکتریسته
علم الکتریسته به دوران باستان بر میگردد که تاریخ دقیق آن مشخص نیست. اما برخی تولد آن را به مشاهده معروف تالس ملطی (Thales of Miletus) در 600 سال قبل از میلاد ارجاع میدهند. که در آن زمان تالس متوجه شد که یک تکه کهربای مالش داده شده خرده های کاه را میرباید، یا اینکه در یک تجربه عادی دیدهایم که وقتی یک شانه کائوچویی سخت را با پارچه پشمی مالش دهیم، شانه ریزههای کوچک کاغذ را جذب میکند. در اثر مالش این دو جسم به یکدیگر هم کائوچو و هم پشم خاصیت جدیدی پیدا میکنند. یعنی باردار میشوند، از این آزمایش برای معرفی مفهوم بار الکتریکی استفاده میشود.منشأ الکتریسته
طبق نظریه الکترونی اتم ، یک اتم از ذرات کوچکتری به نامهای الکترون ، پروتون و نوترون تشکیل شده است، که الکترونها دارای بار منفی و پروتونها دارای بار مثبت و نوترونها بدون بار هستند. تعداد الکترونها و پروتونهای یک اتم در حالت عادی برابر است. بنابراین ، اتم در حالت عادی از نظر بار الکتریکی خنثی است.در اثر تماس ، نزدیکی و یا برخورد اجسام بر همدیگر میان اجسام اندازه حرکت خطی مبادله میشود. در اثر تغییر اندازه حرکت ، نیروهایی ایجاد میشود. چگونگی شکل گیری این نیروها به ساختار اتمی تشکیل دهنده اجسام برمیگردد. به عبارتی این نیروها منشأ الکتریکی و مغناطیسی دارند.
در اثر مالش اجسام بر همدیگر ، جسمی که در اتمهای تشکیل دهنده خود اتمی از نوع دهنده الکترون داشته باشد، الکترون خود را به جسم دیگر که نسبت به آن خاصیت الکترونگاتیوی بیشتری دارد میدهد و مبادله الکترون بین اتمها و در نهایت اجسام منجر به تولید الکتریسته میشود.
تقسیمات الکتریسته
الکتریسته ساکن
اگر یک میله شیشهای را به پارچه پشمی مالش دهیم، هر دو جسم الکتریسته دار میشوند. زیرا شیشه تعدادی الکترون از دست میدهد و پارچه الکترون میگیرد. پس شیشه دارای بار مثبت و پارچه به همان مقدار دارای بار منفی میگردد. بار ایجاد شده در شیشه و پارچه در محل تماس باقی میماند.الکتریسته القایی
اگر میله با بار منفی را به دو کره فلزی بدون باری که باهم در تماس بوده و توسط پایههای عایقی از زمین جدا شده باشند، نزدیک کنیم. قبل از دور کردن میله ، بدون دست زدن به پوسته کرات آنها را از هم جدا کنیم. کره نزدیک به میله دارای بار مثبت و کره دور از آن دارای منفی خواهد بود، که مقدار بار روی کرات برابرند. این نوع باردار شدن را باردار شدن به روش القا یا مجاورت مینامند.الکتریسته جاری
عبور پیوسته الکترون از یک هادی را الکتریسته جاری گویند. خلاف جهت حرکت الکترون را جهت قراردادی جریان الکتریکی (جریان الکترونی) انتخاب میکنند. عامل برقراری جریان ثابت ، اختلاف پتاسیل ثابتی میباشد، که در دو سر هادی برقرار است و وسایل تولید این اختلاف پتاسیل ثابت پیلهای شیمیایی ، ژنراتورها و دیناموها میباشند.اجسام رسانا و نارسانا
بعضی از اجسام مانند فلزات که الکتریسته را به خوبی از خود عبور میدهند، رسانا نامیده میشوند. در این نوع اجسام الکترونهای آزاد اتم به راحتی در شبکه بلوری اجسام حرکت میکنند و عمل رسانایی را انجام میدهند.اجسامی که الکترونهای آزاد ( برای هدایت الکترون ) ندارند و نمیتوانند الکتریسته را از خود عبور دهند، نارسانا یا عایق نامیده میشود. باید توجه نمود که رسانایی یا نارسانایی یک کمیت نسبی است.
توزیع بار الکتریکی در اجسام رسانا
اگر جسم رسانایی بر روی پایه عایقی قرار گیرد و در اثر مالش باردار شود، بار تولید شده در آن در سطح خارجیاش پخش میشود، بطوری که در لبهها و قسمتهای نوک تیز چگالی سطحی بار بیشتر از سایر قسمتها میباشد.بار الکتریکی
میزان باری که ذره بنیادی الکترون دارد را مبنا قرار میگیرد و چون مبادله بار از طریق الکترون صورت میگیرد شمارش تعداد الکترونهای مبادله شده بار الکتریکی جسم را به ما میدهد. به عبارتی اگر جسمی n تا الکترون دریافت نماید، بار الکتریکی آن از نوع منفی بوده (چون الکترون گرفته) و مقدارش n برابر بار الکترون خواهد بود.اگر بار الکتریکی را با علامت q و بار الکترون را با e نمایش دهیم، مقدار بار الکتریکی هر جسم از رابطه q = ne تبعیت مینماید. واحد بار الکتریکی به افتخار اولین قانون الکتریسته (قانون کولن) که آقای کولن کشف نمود، کولن نام دارد. بار الکتریکی یک الکترون در دستگاه برحسب کولن برابر است با:
 |
اثر بارهای الکتریکی بر همدیگر
بر طبق قانون کولن دو بار الکتریکی همنام همدیگر را دفع و دو بار الکتریکی غیر همنام همدیگر را جذب میکنند. مقدار نیروی جاذبه یا دافعه بین بارها بر طبق قانون کولن با حاصلضرب اندازه بارها نسبت مستقیم و با مجذور فاصله بارها نسبت عکس دارد. این نیرو به جنس محیطی که بارها در آن واقع شده نیز وابسته است (بستگی نیرو به گذردهی الکتریکی محیط).کاربردهای الکتریسته
کابردهای الکتریسته یا نیروی برق بر کسی پوشیده نیست و به قوت میشود گفت که امروزه بدون آن نمیتوان زندگی کرد. با این حال عمدهترین کاربردهایش عبارتند از:اسیلوسکوپ
مقدمه
اسیلوسکوپ در حقیقت رسامهای بسیار سریع هستند که سیگنال ورودی را در برابر زمان یا در برابر سیگنال دیگر نمایش میدهند. قلم این رسام یک لکه نورانی است که در اثر برخورد یک باریکه الکترون به پردهای فلوئورسان بوجود میآید.به علت لختی بسیار کم باریکه الکترون میتوان این باریکه را برای دنبال کردن تغییرات لحظهای (ولتاژهایی که بسیار سریع تغییر میکنند، یا فرکانسهای بسیار بالا) بکار برد. اسیلوسکوپ بر اساس ولتاژ کار میکند. البته به کمک مبدلها (ترانزیستورها) میتوان جریان الکتریکی و کمیتهای دیگر فیزیکی و مکانیکی را به ولتاژ تبدیل کرد.
قسمتهای مختلف اسیلوسکوپ
لامپ پرتو کاتدی
اسیلوسکوپ از یک لامپ پرتو کاتدی که قلب دستگاه است و تعدادی مدار برای کار کردن لامپ پرتو کاتدی تشکیل شده است. قسمتهای مختلف لامپ پرتو کاتدی عبارتند از:- تفنگ الکترونی :
تفنگ الکترونی باریکه متمرکزی از الکترونها را بوجود میآورد که شتاب زیادی کسب کردهاند. این باریکه الکترون با انرژی کافی به صفحه فلوئورسان برخورد میکند و بر روی آن یک لکه نورانی تولید میکند. تفنگ الکترونی از رشته گرمکن ، کاتد ، شبکه آند پیش شتاب دهنده ، آند کانونی کننده و آند شتاب دهنده تشکیل شده است.
الکترونها از کاتدی که بطور غیر مستقیم گرم میشود، گسیل میشوند. این الکترونها از روزنه کوچکی در شبکه کنترل میگردند. شبکه کنترل معمولا یک استوانه هم محور با لامپ است و دارای سوراخی است که در مرکز آن قرار دارد. الکترونهای گسیل شده از کاتد که از روزنه میگذرند (به دلیل پتانسیل مثبت زیادی که به آندهای پیش شتاب دهنده و شتاب دهنده اعمال میشود)، شتاب میگیرند. باریکه الکترونی را آند کانونی کننده ، کانونی میکند.
- صفحات انحراف دهنده :
صفحات انحراف دهنده شامل دو دسته صفحه است. صفحات انحراف قائم که بطور افقی نسب میشوند و یک میدان الکتریکی در صفحه قائم ایجاد میکنند و صفحات y نامیده میشوند. صفحات انحراف افقی بطور قائم نصب میشوند و انحراف افقی ایجاد میکنند و صفحات x نامیده میشوند. فاصله صفحات به اندازه کافی زیاد است که باریکه بتواند بدون برخورد با آنها عبور کند.
- صفحه فلوئورسان :
جنس این پرده که در داخل لامپ پرتو کاتدی قرار دارد، از جنس فسفر است. این ماده دارای این خاصیت است که انرژی جنبشی الکترونهای برخورد کننده را جذب میکند و آنها را به صورت یک لکه نورانی ظاهر میسازد. قسمتهای دیگر لامپ پرتو کاتدی شامل پوشش شیشهای ، پایه که از طریق آن اتصالات برقرار میشود، است.
مولد مبنای زمان
اسیلوسکوپها بیشتر برای اندازه گیری و نمایش کمیات وابسته به زمان بکار میروند. برای این کار لازم است که لکه نورانی لامپ روی پرده با سرعت ثابت از چپ به راست حرکت کند. بدین منظور یک ولتاژ مثبت به صفحات انحراف افقی اعمال میشود. مداری که این ولتاژ مثبت را تولید میکند، مولد مبنای زمان یا مولد رویش نامیده میشود.مدارهای اصلی اسیلوسکوپ
سیستم انحراف قائم
چون سیگنالها برای ایجاد انحراف قابل اندازه گیری بر روی صفحه لامپ به اندازه کافی قوی نیستند، لذا معمولا تقویت قائم لازم است. هنگام اندازه گیری سیگنالهای با ولتاژ بالا باید آنها را تضعیف کرد تا در محدوده تقویت کنندههای قائم قرار گیرند. خروجی تقویت کننده قائم ، از طریق انتخاب همزمانی در وضعیت داخلی، به تقویت کننده همزمان نیز اعمال میشود.سیستم انحراف افقی
صفحات انحراف افقی را ولتاژ رویش که مولد مبنای زمان تولید میکند، تغذیه میکند. این سیگنال از طریق یک تقویت کننده اعمال میشود، ولی اگر دامنه سیگنالها به اندازه کافی باشد، میتوان آن را مستقیما اعمال کرد. هنگامی که به سیستم انحراف افقی ، سیگنال خارجی اعمال میشود، باز هم از طرق تقویت کننده افقی و کلید انتخاب رویش در وضعیت خارجی اعمال خواهد شد. اگر کلید انتخاب رویش در وضعیت داخلی باشد، تقویت کننده افقی ، سیگنال ورودی خود را از مولد رویش دندانهداری که با تقویت کننده همزمان راه اندازی میشود، میگیرد.همزمانی
هر نوع رویشی که بکار میرود، باید با سیگنال مورد بررسی همزمان باشد. تا یک تصویر بی حرکت بوجود آید. برای این کار باید فرکانس سیگنال مبنای زمان مقسوم علیهای از فرکانس سیگنال مورد بررسی باشد.مواد محو کننده
در طی زمان رویش ، ولتاژ دندانهدار رویش اعمال شده به صفحات x ، لکه نورانی را بر یک خط افقی از چپ به راست روی صفحه لامپ حرکت میدهد. اگر سرعت حرکت کم باشد، یک لکه دیده میشود و اگر سرعت زیاد باشد، لکه به صورت یک خط دیده میشود. در سرعتهای خیلی زیاد ، ضخامت خط کم شده و تار به نظر میرسد و یا حتی دیده نمیشود.کنترل وضعیت
وسیلهای برای کنترل حرکت مسیر باریکه بر روی صفحه لازم است. با این کار شکل موج ظاهر شده بر روی صفحه را میتوان بالا یا پائین یا به چپ یا راست حرکت داد. این کار را میتوان با اعمال یک ولتاژ کوچک سیستم داخلی (که مستقل است) به صفحات انحراف دهنده انجام داد. این ولتاژ را میتوان با یک پتانسیومتر تغییر داد.کنترل کانونی بودن
الکترود کانونی کننده مثل یک عدسی با فاصله کانونی تغییر میکند. این تغییر با تغییر پتانسیل آند کانونی کننده صورت میگیرد.کنترل شدت
شدت باریکه با پتانسیومتر کنترل کننده شدت که پتانسیل شبکه را نسبت به کاتد تغییر میدهد، تنظیم میشود.مدار کالیبره سازی
در اسیلوسکوپهای آزمایشگاهی معمولا یک ولتاژ پایدار داخلی تولید میشود که دامنه مشخصی دارد. این ولتاژ که برای کالیبره سازی مورد استفاده قرار میگیرد، معمولا یک موج مربعی است.
مدار رقص نور ساده
در این مدار با یک رقص نور ساده آشنا می شوید.قطعات مورد نیاز
- 10 عدد LED قرمز یا هر رنگ دیگر
- 1 عدد آیسی 4011
- 1 عدد آیسی 4017
- 1 عدد خازن 0.1UF
- 1 عدد پتانسیومتر 100k
- 1 عدد مقاومت 1 مگا اهم
- 1 عدد مقاومت 1 کیلو اهم
- برد بورد
- سیم تلفنی
آیسی 4011
این آیسی دارای 4 گیت NAND است.به پایه های ورودی وخروجی در شکل زیر دقت کنید.،پایه 7 تغذیه منفی و پایه 14 تغذیه مثبت است.گیت NAND عکس گیت AND است.همانطور که در شکل مشاهده می کنید.،علامت NOT در بالای AND هر دو پایه ورودی وجود دارد.J،K،L،M پایه های خروجی هستند.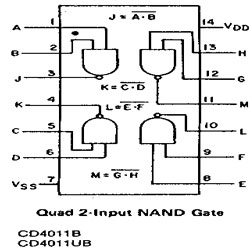 |
LED
پایه بلندتر پایه مثبت(آند) و پایه کوتاهتر منفی (کاتد)است.همانطور که در نقشه ملاحظه می کنید.پایه بلندتر به پایه های آیسی متصل است و پایه کوتاهتر تمامی LED ها به صورت مشترک به منفی منبع تغذیه متصل شده است. |
نقشه مدار
تمام اتصالات کاملا در نقشه مشخص است.،آیسی 4017 یک Shift Register است.که پالس دریافت شده در پایه 14 را که در نقشه می بینید.،به بقیه پایه هایی که LED به آن متصل است.، شیفت می دهد.واین کار مکررا تکرار می شود وشما شاهد روشن و خاموش شدن LED ها خواهید بود.،اگر مدار شما عمل نکرد.،با استفاده از پیچ گوشتی ساعتی پتانسیومتر را به گونه ای تنظیم کنید.،تا شاهد رقص نور در LED ها باشید.U2 آیسی 4011 و U1A ,U1B در واقع 2 تا از گیتهای NAND آیسی 4011 است.پایه 15 آیسی 4017 پایه reset یا آغاز شمارش از پایه 3 است.این پایه با لبه بالارونده ولتاژ تحریک می شود.برای جلوگیری از reset مدار به صورت ناخودآگاه آنرا به همراه پایه8 و 13 زمین می کنیم.
پایه 14 نیز نسبت به لبه بالا رونده پالس حساس است.و به محض دریافت پالس در اولین بار پایه 3 را high می کند.وشما شاهد روشن شدن LED متصل به این پایه می شوید.این روند تا پایه 11 که آخرین پایه مربوط به شمارش است در صورت دریافت پالس در پایه 14 ادامه خواهد داشت.
پالس نیز به طور خودکار توسط آیسی NAND 4011 ایجاد می شود.فاصله زمانی بین شارژ و دشارژ خازن باعث تحریک پایه 14 می شود.فاصله زمانی بین شارژ و دشارژ خازن در واقع فاصله زمانی بین روشن و خاموش شدن LED ها یا high و low شدن پایه های آیسی 4017 است.
می توانید با پیچ گوشتی ساعتی این پتانسیو متر را پیچانده و فاصله زمانی شارژ و دشارژ خازن و در واقع فاصله زمانی بین شمارش ها را به طور دلخواه تنظیم کنید.
 |
<موفقیت شما آرزوی من است >
موتور پله ای
موتور پله ای (Stepper Motor) یکی از انواع موتورهای الکتریکی است که حرکت آن کاملا دقیق و از پیش تعریف شده می باشد و با ارسال بیتهای 0,1به سیم پیچهای آن می توان آنرا حرکت داد. |
 |
|
| |
ساختار موتور پله ای
 |
این موتورعموما دارای چهار قطب میباشد که سیم پیچها بر روی این چهار قطب قرار می گیرند و شما با ارسال بیتهای 0و1به این سیم پیچها در واقع میدان مغناطیسی ایجاد می کنید که این میدان باعث حرکت روتورمغناطیسی موجود در داخل موتور پله ای می شود البته میبایست این سیم پیچها را به توالی 0 و 1 کرد و گرنه موتو ر مطابق میل شما نخواهد چرخید یکی از مشخصه های این موتور زاویه حرکت آن می باشد و هر موتوری زاویه حرکتی مخصوص به خودش را دارد مثلا اگر موتوری زاویه حرکتش 7درجه باشد این موتور در هر بار ی که سیم پیچهایش حاوی ولتاژ می شوند 7 درجه در سمت حرکت عقربه های ساعت یا خلاف جهت آن بسته به اینکه سیم پیچها با چه ترتیبی ولتاژ دار می شوند خو اهد چرخید این 7 درجه چرخش برای این موتور پله ای نمونه یک پله یا یک step محسوب می شود با این تعریف متوجه شدید که یک موتور پله ای در یک دور کامل ممکن است.،100تا 200 پله کمتر یا بیشتر بسته به نوع موتور خواهد داشت.شما حتی می توانید یک موتور پله ای را به صورت نیم پله یعنی با نصف زاویه حرکت راه اندازی کنید این موتورها به صورت میکرو پله نیز حرکت می کنند در واقع منظور حرکت خیلی ریز ودقیق است. وقتیکه شما یک موتور پله ای را از نزدیک می بینید متوجه تعدادی سیم رنگی می شوید که از موتور پله ای بیرون آمده در واقع این سیم ها هر کدام به سر یک سیم پیج متصل هستند و یک سیم بین تمام سیم ها مشترک است
نحوه کنترل
این موتور به صورت 1 بیتی یا دو بیتی حرکت می کند در حالت یک بیتی در هر لحظه تنها یک سیم پیچ پالس 1 را دریافت می کند ودر حالت دو بیتی دو سیم پیچ در هر لحظه پالس 1 را دریا فت می کنند اگر این دریافت پالس به صورت منظم و پشت سر هم انجام شو د موتور نیز به صورت صحیح به سمت جهت حرکت عقربه های ساعت یا خلاف جهت آن حرکت خواهد کرد.
بیایید نحو ه کنترل موتور پله ای را در دو حالت یک بیتی یا دو بیتی بررسی کنیم
نحوه کنترل 1 بیتی
در حالت یک بیتی اگر اول سیم پیچ 1 را تحریک کنیم .سیم پیچ 2و3و4 بدون تحریک باید باشند جهت حرکت موتور پله ای در سمت حرکت عقربه های ساعت بعد از سیم پیچ 1 نوبت سیم پیچ 2 است که تحریک شود.، و در این حالت نیز بقیه سیم پیچها بدون تحریک هستند بعد از آن نوبت سیم پیچ 3 و سپس نوبت سیم پیچ شماره 4 است دقت کنید که در هر لحظه یک سیم پیچ تحریک شو د اگر بعد از سیم پیچ 1 سیم پیچ 4 را تحریک کنیم و سپس به سراغ3و2 برویم موتور در جهت عکس عقربه های ساعت خواهد چرخید.
نحوه کنترل 2 بیتی
در حالت دو بیتی در لحظه دو سیم پیچ بار دار می شو ند مثلا اگر اول سیم پیچ 1 و2 تحریک شوند بعد سیم پیچ 2و3 سپس 3و4 ودر نهایت 4و 1 برای حرکت موتور پله ای بایست همین ترتیب را تا موقعییکه می خوا هید موتور حرکت داشته باشد ادامه دهید حال اگر این ترتیب را عوض کنید موتور در خلاف جهت فعلی حرکت می کند
 |
 |
|
|
|
نحوه حرکت موتورهای الکتریکی
حالا بیا یید ببینیم چه اتفاق می افتد که موتور پله ای حرکت می کند.
کلید فهمیدن اینکه موتورهای الکتریکی چگونه کار می کنند فهمیدن نحوه عملکرد آهن ربای الکتریکی است آهن ربای الکتریکی مبنای کار موتورهای الکتریکی است.
اگر سیمی حدود 10 سانتی متر بردارید و به دور میخی بپیچید و دو سر آنرا به دو سر یک باطری وصل کنید زمانیکه جریان از سیم عبور می کند یک میدان مغناطیسی در اطراف سیم ایجاد می شود و آن میخ تبدیل به آهنربا می شود این میدان تا زمانییکه جریان از سیم عبور میکند وجود دارد یعنی تا زمانییکه دو سر سیم به باطری متصل باشد و زمانییکه این اتصال قطع شود این میدان نیز از بین می رود آن سر میخ که به قطب مثبت باطری وصل شده S وسر دیگر را که به قطب منفی باطری وصل شده N می نامییم حال اگر یک آهن ربای نعلی شکل بردارید و این میخ را به صورت معلق در وسط این آهن ربا قرار دهید به طورییکه میخ کاملا افقی قرار گیرد در صورتیکه قطب N میخ در مقابل قطب N آهن ربا ی نعلی شکل قرار بگیرد
وقطب دیگر میخ نیز به همین صورت در این وضعییت میخ 180 درجه خواهد چرخد تا قطب N میخ در مقابل قطب S آهنربا و قطب S میخ در مقابل قطب N آهن ربا قراربگیرد همانطور که میدانید دو قطب متضاد همدیگر را جذب ودو قطب همسان همدیگر را دفع می کنند که حرکت میخ نیز در آهن ربای نعلی شکل به همین صورت است
حرکت موتورهای الکتریکی نیز در واقع از همین قانون پیروی می کند ما هر بار که در یک موتور پله ای یک سیم پیچ را تحریک می کنیم در واقع قطبهای N , S را در داخل موتور ایجاد میکنیم و روتور نیز مثل آن میخ و با استفاده از قانون جذب ودفع قطبها به حرکت در مآید واین حرکت همان چیزی است که ما به صورت فیزیکی از موتور مشاهده می کنیم .